
Anzeige


Per USB-C kann man das Material direkt vom Speichermedium auf den Rechner ziehen.
Post
Raw-Material wird beim Ronin 4D in ProRes aufgenommen. Das bedeutet zum einen: so gut wie keine einstellbaren Raw-Parameter in Premiere, sowie den Verzicht auf DaVinci Resolve (Test). Zum anderen bedeutet dieses Format aber einen flüssigen Schnittprozess — ProRes Raw verhält sich sehr gut in der Timeline: Auf meinem Schnitt-Laptop liefen die Videos mit Farbkorrektur in voller Auflösung ohne Ruckeln. Mit dem Filter »Unscharf Maskieren« kann man immer ganz gut sein System testen, hier liefen die Videos dann nur noch bei 1/8-Auflösung glatt durch.
Aktuell gibt es übrigens noch keine offiziellen LUTs für das Raw-Material der X9, in dem minimalistischen Raw-Tab in Premiere kann man die Belichtung verändern und den Farbraum auswählen. Dort gibt es unter anderem die Auswahl zwischen Rec.709, D-Log sowie Canon, Sony und Panasonic Log.

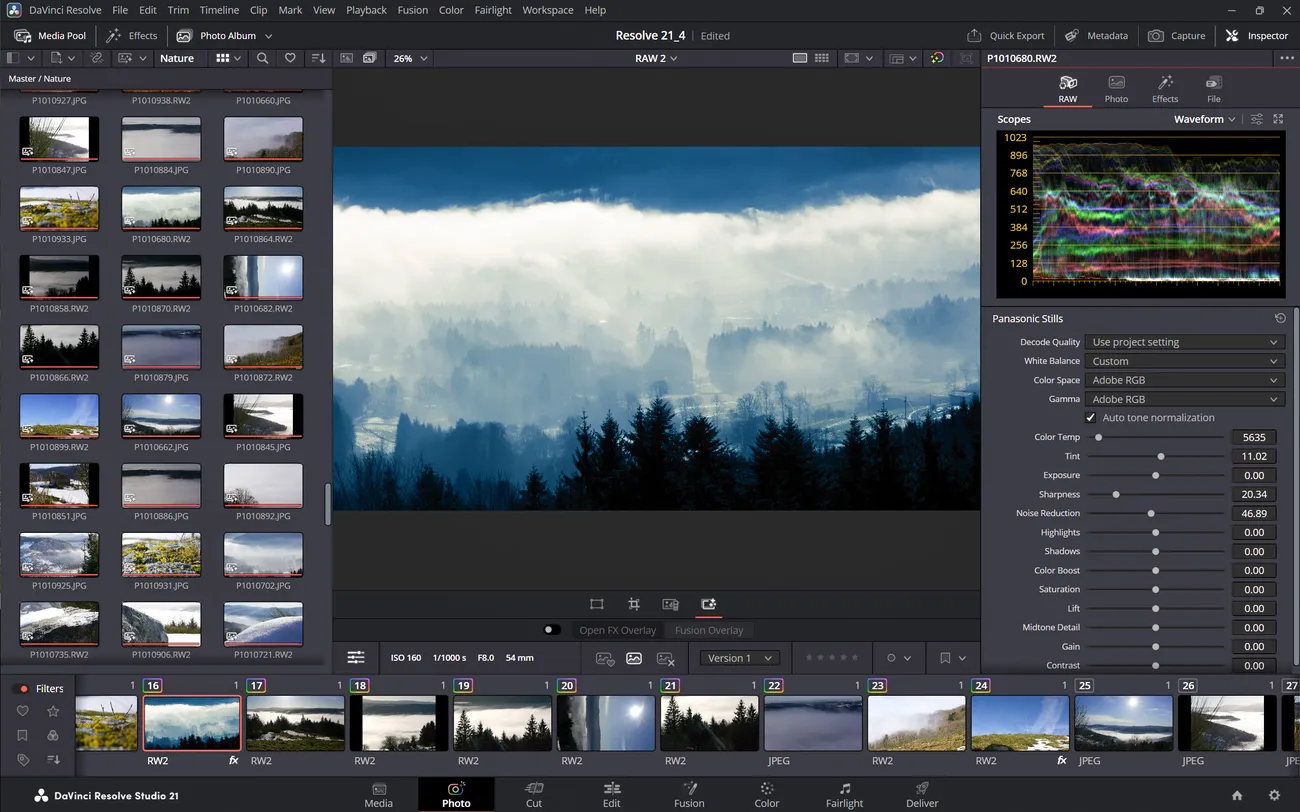
Leider harmonieren DaVinci Resolve und Ronin 4D noch nicht gut miteinander.
Am besten zurechtgekommen bin ich tatsächlich mit manueller Anpassung, hier wäre DaVinci Resolve mit seinen Tools natürlich ein großes Plus. In Premiere wählt man den Clip an und geht zu den Effekteinstellungen. Am oberen Rand links neben dem Clip-Namen ist ein Tab mit der Bezeichnung »Quelle«, worunter sich die Raw-Einstellungen befinden. In diesem Fall wählen wir D-Log aus.
Da die Lumetri-Tools auch auf das Raw-Material zugreifen, kann man damit dann bequemer die Belichtung anpassen und bei Bedarf Masken setzen.
Die Farben der X9 sind leider (noch) nicht ganz so schön wie die der aktuellen DSLM-Kameras, besonders Canon-DSLMs stechen in diesem Aspekt natürlich hervor. Manuell lässt sich das Material zwar gut anpassen, aber auch hier wieder der Verweis auf DaVinci resolve, mit dem es viel einfacher ginge. Beim Grading an sich kann man dank Raw natürlich weiter gehen als mit H.264-Material. Bei teilweise stark überbelichteten Aufnahmen mit Bäumen konnte ich jeden noch so dünnen Ast zurückholen, Zeichnung im Himmel sowieso. Leider sind die De-Noiser in Premiere nicht besonders ressourcenschonend, aber bei Raw-Material oft unabdingbar.
Spätestens im Schnitt mit großem Monitor offenbart sich dann auch, wie gut der Gimbal arbeitet.
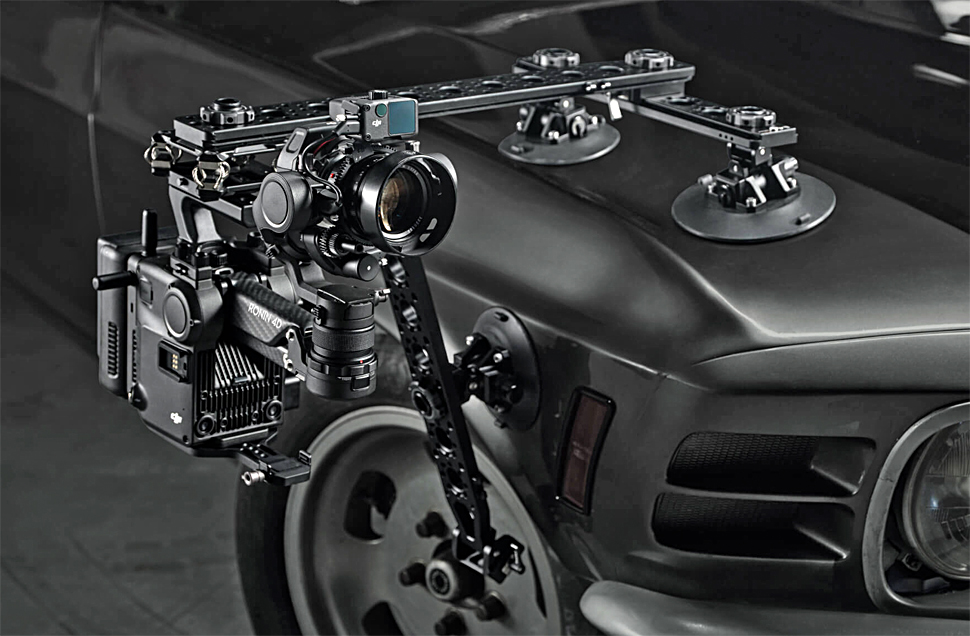
Weitere Car-Mount-Möglichkeit.
Beim Rennen am Strand konnte ich Vibrationen im Bild sehen. Hier hätte ein Fein-Tuning der Z-Achse wahrscheinlich bessere Ergebnisse geliefert. Bei der Autofahrt mit offenem Fenster, die bis zu 80 km/h ging, waren hingegen keinerlei Vibrationen zu sehen.

Der »Duckwalk« ist im unebenen Gelände kaum möglich.
Im Allgemeinen ist mir aufgefallen, dass beim Laufen auf unebenem Boden öfter Vibrationen im Bild auftraten – das liegt daran, dass man hier keinen richtigen »Duckwalk« hinlegen kann: die Füße mit wenig Abstand über den Boden zu bewegen, das geht am Strand oder auf einem Acker eher schlecht. Sobald man aber »die Ente« macht, ist das Bild ruckelfrei.
Generell werden die Aufnahmen in unseren Testvideos nicht nachträglich stabilisiert — und wenn doch, ist dies gekennzeichnet. Daher kann man anhand dieser Aufnahmen ganz gut sehen, was der Gimbal leistet.
Ich habe dessen Motorparameter sowie das Ansprechverhalten des Trackings auf »Werkseinstellung« gelassen und lediglich den Gimbal kalibriert. Man kann die ganzen Bewegungen natürlich auch viel langsamer einstellen, um extrem ruhige Fahrten zu machen. Gerade für das Tracking ist dies ratsam, um keine Bildruckler zu provozieren. Sind die Einstellungen zu hart, versucht der Gimbal immer wieder nachzukorrigieren.
Seite 1: Einleitung, Video
Seite 2: Einsatzzweck, Kamerakopf
Seite 3: Recorder, Monitore, Lidar
Seite 4: Handling, Bedienung, Schnittstellen
Seite 5: Praxis, Video
Seite 6: Post
Seite 7: Fazit




Anzeige






Anzeige

Anzeige

Anzeige

Anzeige
